For the first match of motor and sabvoton controller, it always need to do hall angle test.
Now, I will introduce the hall angle test method by bluetooth and PC.
1) Installed the motor in the vehicle, and hang in the air
2) Connect motor with controller, three phase wires & hall plug
3) Connect battery B+ and B- with controller, connect controller ignition wire with ignition or battery B+.
4) Connect controller with blueooth adapter or PC.
5) Power on battery, open APP in phone or software in the PC.
6) For APP in the phone, “given current 20A OK” -- “run mode Test mode” -- “Hall test enable”.
7) For software in the PC, “test given current 20A OK” -- “control mode test mode OK” -- “Hall angle test enable OK”.
8) After the step 6 or 7, the motor will spin little by little, it will make a cycle spinning, after then, the motor will stop and hall angle will be changed accordingly.
9) If the hall angle test failed, you can exchange the phase wires & hall signal wires to test again.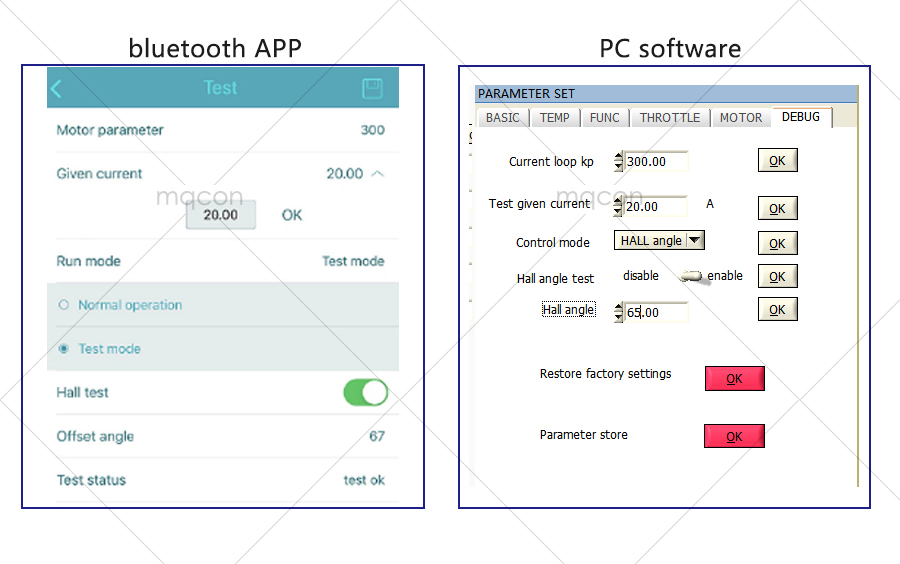
Debug parameters:
1) Motor parameter/Current loop kp: The parameter will be different for different motors as the technique and craft is different too. One could adjust the value by himself to suit their motors. But this value shall not exceed 3000. There is no need to adjust the“current loop ki”normally. If the driver feel shake obviously, maybe we can modified the value to have a try. Generally, for 205 stator motor, set 999, for 273 stator motor, set 299. (you can adjust this parameter based on our data according to your real test, it can reduce vibration and noise)
2) Test given current: Value range: 10~30A, generally use 15A or 20A to do test. If the motor with great reluctance force, just improve the value to make it spin evently. For mid-drive motor, it generally set 25A.
3) Control mode: Normal mode or hall test mode selected. After hall angle test finished, you can change back to normal mode.
4) Hall angle test: If hall angle already confirmed, pls. disable it. If it's the first match for new motor, pls. do the hall angle test first, make sure the battery power on and motor on no-load status, otherwise it will be failed.
5) Hall angle: When main interface indicate the hall angle test ok , the hall angle will be updated after switch another tab(not DEBUG TAB) and then back to BEBUG TAB.
If we know the hall angle in advance ,input the angle directly without hall angle testing. For example, QS Motor V3, Hall angle 245±10; normal motor hall angle 66±10.
6) Reset factory setting: If execute the command, Controller will use the factory setting
7) Parameter store: If execute the command, all modified parameters will be saved after next powered on
More details:
How to connect with USB cable: http://www.mqcontroller.com/show/?id=117
How to connect with Hall plug & Phase wires: http://www.mqcontroller.com/show/?id=106 http://www.mqcontroller.com/show/?id=107
Sabvoton controller hall angle test, sabvoton controller self-learing work, sabvoton controller match work





